V-Leitwerk Mischer Selbstbau
Ein V-Mischer, oder manchmal auch Y-Mischer genannt, mischt zwei Empfängerkanäle zusammen.
Diese Mischer können z.B. in V-Leitwerk-, Delta- oder Nurflüglermodellen eingesetzt werden.
Den Mischer habe ich entwickelt, da ich zu diesem Zeitpunkt einen Koaxialhubschrauber auf Brushless umgerüstet hatte. Hier kommt der Mischer nach dem Kreisel zur Steuerung der Hauptmotoren zum Einsatz.
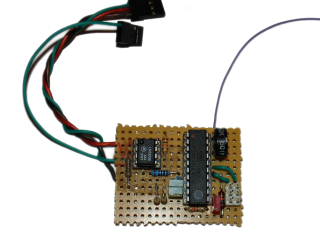
Der Mischer ist zwar nicht gerade klein geraten, dafür aber voll funktionsfähig. Im Gegensatz zu käuflichen Mischern werde ich bei Gelegenheit noch eine Akkuüberwachung integrieren (Die Schaltung ist schon dafür vorbereitet, es fehlt nur noch an ein paar Zeilen Code).
Diese Mischer können z.B. in V-Leitwerk-, Delta- oder Nurflüglermodellen eingesetzt werden.
Den Mischer habe ich entwickelt, da ich zu diesem Zeitpunkt einen Koaxialhubschrauber auf Brushless umgerüstet hatte. Hier kommt der Mischer nach dem Kreisel zur Steuerung der Hauptmotoren zum Einsatz.
Der Mischer ist zwar nicht gerade klein geraten, dafür aber voll funktionsfähig. Im Gegensatz zu käuflichen Mischern werde ich bei Gelegenheit noch eine Akkuüberwachung integrieren (Die Schaltung ist schon dafür vorbereitet, es fehlt nur noch an ein paar Zeilen Code).
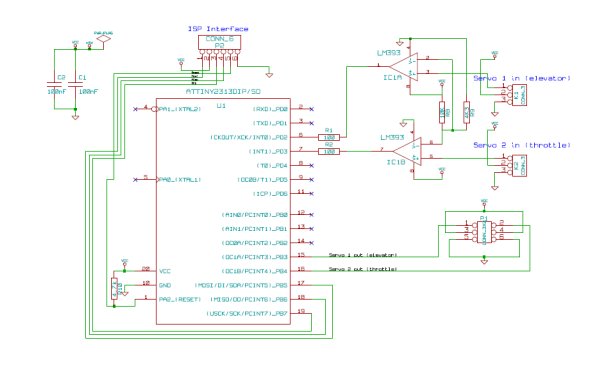
Schaltplan
Wie man auf dem Schaltplan erkennen kann habe ich an den Servoeingängen jeweils einen Komparator verschaltet.
Der Grund war ein zu geringer High-Pegel vom Empfängerausgang. Ich hatte dies mit zwei Futaba Empfängern getestet, beide hatten einen Low-Pegel von 0 V und einen High-Pegel von 2,5 Volt. Diese 2,5 Volt sind für den µC zu niedrig, so dass dieser die Impulse nicht erkannt hatte. Über den Spannungsteiler wird die Referenzspannung auf ca. 1,2 Volt eingestellt.
Zwei der drei LEDs sind zur Anzeige der Knüppel Aktivität. Die einzele LED ist für die Unterspannungsregelung vorgesehen.
Benötigte Bauteile:
- 1x Atmel Tiny 2313
- 1x LM393
- 1x 100nF Kondensator
- 3x LED
- 3x 330R Widerstand
- 2x 100R Widerstand
- 1x 15k Widerstand
- 1x 4,5k Widerstand
- 1x 10k Widerstand
- 1x 45k Poti
- Pfostenleiste
- 2x Servostecker
Die Software
Die Software für den ATTiny habe ich in C geschrieben.
Es werden die Zeiten Interrupts 0 und 1 gemessen und anschließend gemischt.
Die Ausgabe erfolgt über den 16Bit PWM Modulator des Tiny.
Es werden die Zeiten Interrupts 0 und 1 gemessen und anschließend gemischt.
Die Ausgabe erfolgt über den 16Bit PWM Modulator des Tiny.
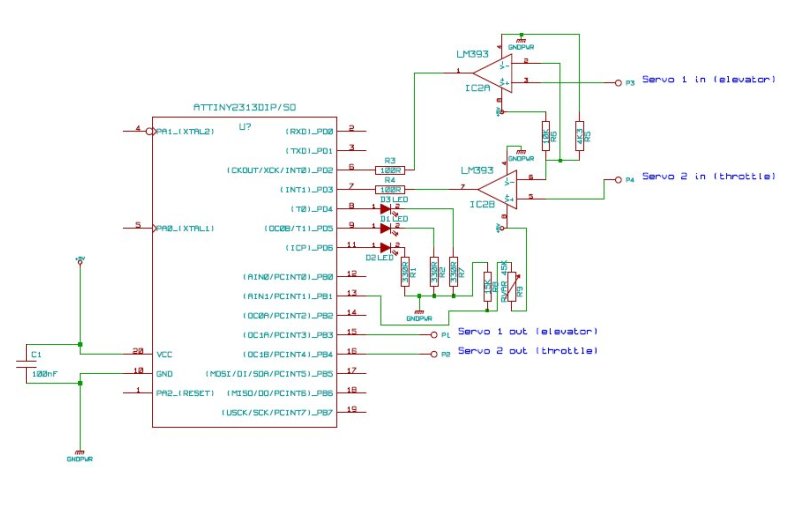
Version 2 - SMD
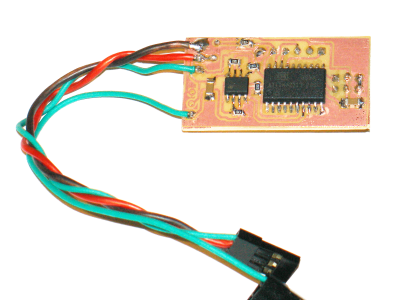
Da mir die erste Version zu Groß für meinen Lama Brushless Umbau war habe ich mich an die Entwicklung eines Mischers in SMD technik gemacht.
Die Hardware wurde etwas abgespeckt, so musten z.B. die LEDs weichen.
Die Software wurde aber nicht geändert.
Schaltplan Mischer 2